
两倍300.jpg)
两倍300.jpg)
两倍300.jpg)




- FIP
- Diana 7
- Diana 7 Med
- Thor 3
- Thor 7
- Thor 7 Pro
- Thor 12
-
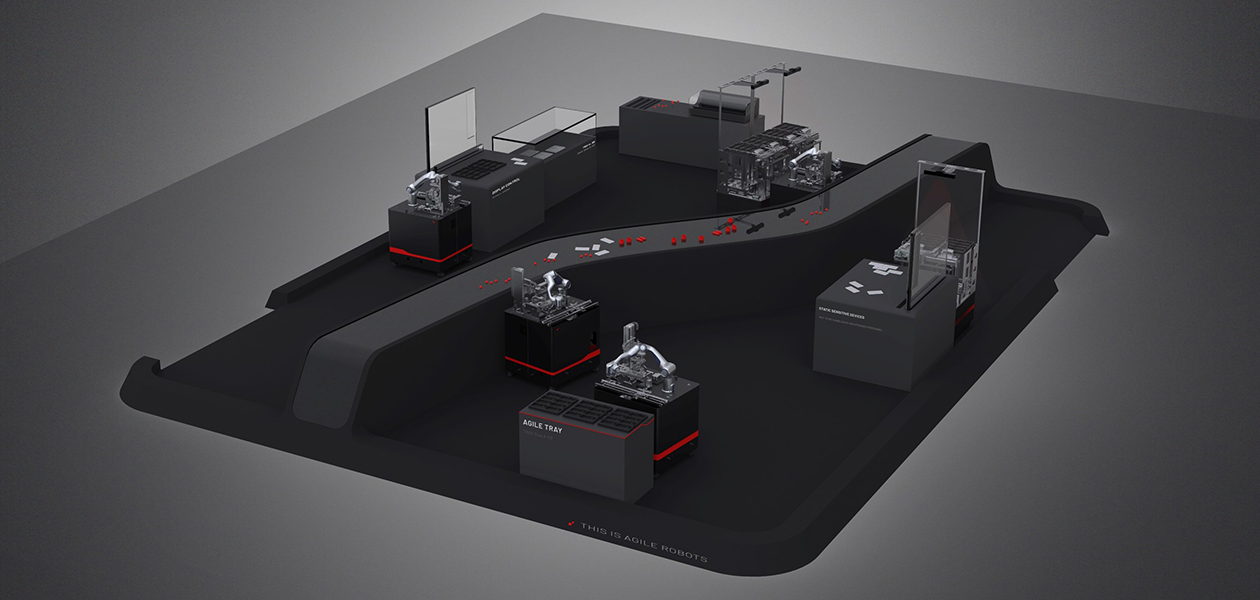
FIP智能柔性機器人(rén)操作平台柔性智能平台是由智能機器人(rén)操作平台、模塊化(huà)傳送帶和(hé)智能化(huà)供料系統組成,通(tōng)過可(kě)快(kuài)速更換的(de)模塊化(huà)末端工具和(hé)平台工裝,能夠快(kuài)速适應不同機型手機生産線的(de)機器人(rén)平台。 柔性智能平台搭配了(le)思靈機器人(rén)自主開發的(de) Agile Core操作系統,可(kě)實現新技能加載、任務編程、産線布局修改調整,乃至全智能化(huà)生産。 柔性智能平台可(kě)大(dà)大(dà)縮短用(yòng)戶生産線和(hé)機器人(rén)部署時(shí)間,爲用(yòng)戶降低集成難度和(hé)人(rén)力投入成本。
-
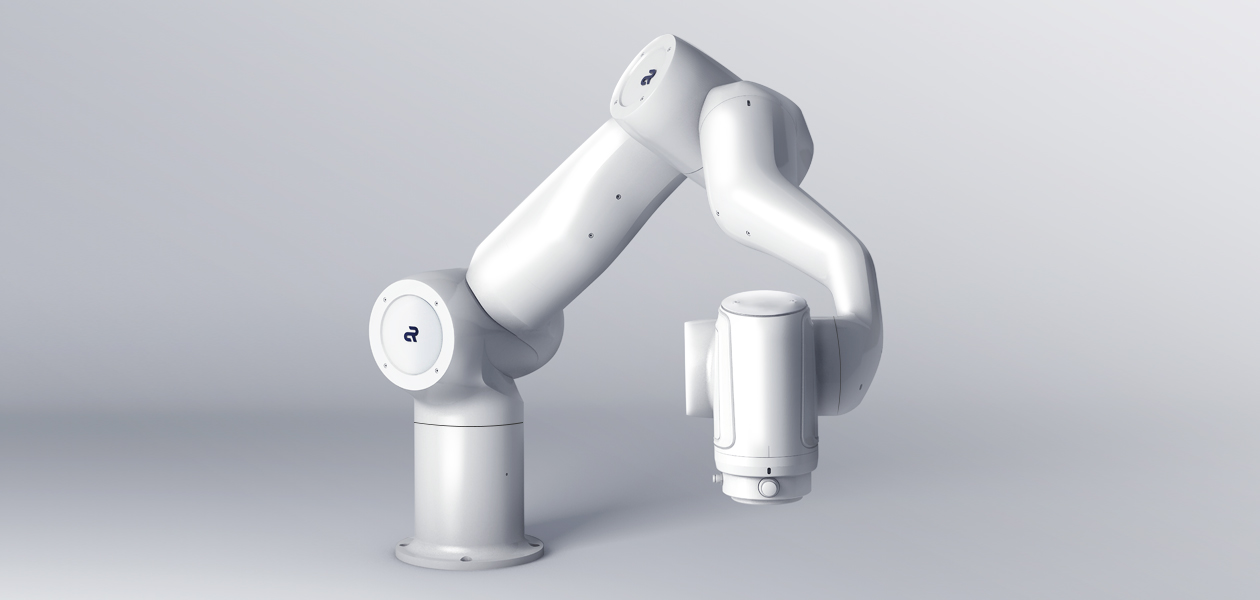
Diana 7智能力控機器人(rén)Diana 7 是思靈機器人(rén)自主研發的(de)高(gāo)精度智能力控機器人(rén),關節内置高(gāo)精度扭矩傳感器,具有高(gāo)靈敏的(de)力控制能力和(hé)碰撞檢測能力。采用(yòng)七自由度冗餘設計提高(gāo)了(le)機器人(rén)的(de)運動靈活度,零空間控制技術使得(de)機器人(rén)能夠在有限工作空間中靈活避障,因此可(kě)以輕松适應更複雜(zá)的(de)應用(yòng)場(chǎng)景。
-
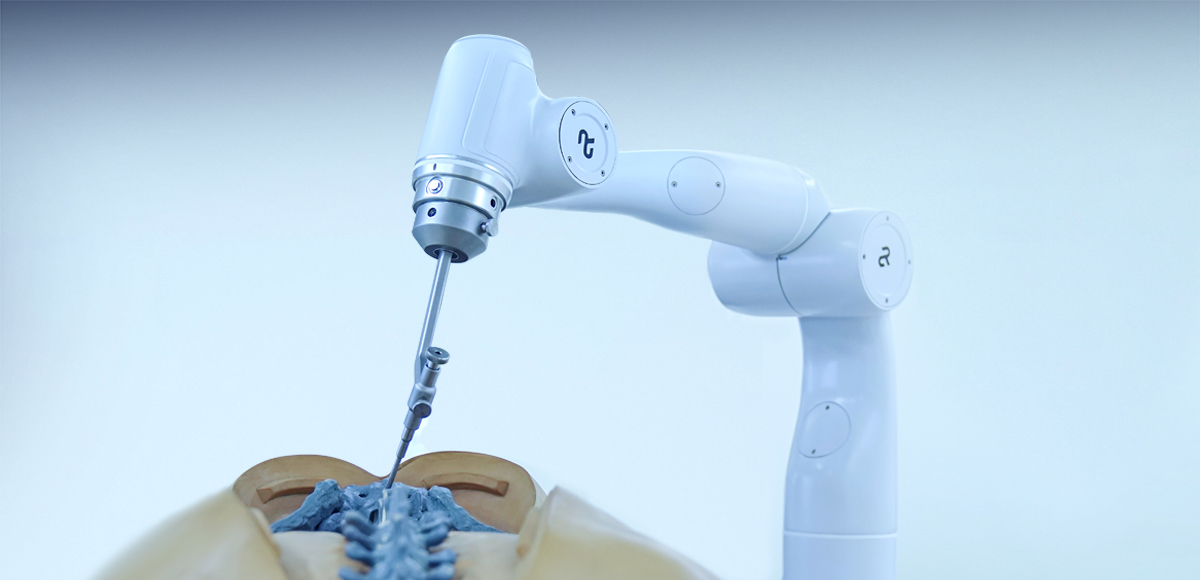
Diana 7 Med通(tōng)用(yòng)智能力控醫療機器人(rén)Diana 7 Med 是思靈機器人(rén)自主研發的(de)通(tōng)用(yòng)醫療機器人(rén),關節内置高(gāo)精度扭矩傳感器,具有高(gāo)靈敏的(de)力感知能力和(hé)碰撞檢測能力。采用(yòng) 7 自由度設計,具有靈活的(de)工作空間和(hé)控制模式。主要應用(yòng)場(chǎng)景包括: 骨科、神經外科、牙科等硬組織的(de)機器人(rén)輔助手術,此外也(yě)可(kě)用(yòng)于超聲相關的(de)診療、康複理(lǐ)療等。
-
Thor 3智能機器人(rén)Thor3是思靈機器人(rén)自主研發的(de)高(gāo)精度智能機器人(rén),具備安全碰撞檢測及圖形化(huà)編程等功能。具有小巧輕便、敏捷到位、易于操作及安裝快(kuài)捷的(de)特點,适合應用(yòng)在輕型裝配和(hé)自動化(huà)作業台等場(chǎng)合,可(kě)以輕松實現作業場(chǎng)景的(de)快(kuài)速部署,并能夠與周邊設備和(hé)環境進行安全的(de)交互。
-
Thor 7高(gāo)精度智能機器人(rén)Thor7是思靈機器人(rén)自主研發的(de)高(gāo)精度智能機器人(rén),具備安全碰撞檢測和(hé)圖形化(huà)編程功能。負載7kg,工作半徑可(kě)達900mm,具有易于操作、敏捷到位、部署快(kuài)捷的(de)特點,适用(yòng)于自動化(huà)集成、裝配、上下(xià)料等場(chǎng)景,且能夠與周邊設備和(hé)環境進行安全的(de)交互。
-
Thor 7 Pro高(gāo)精度智能力控機器人(rén)Thor7 Pro是思靈機器人(rén)自主研發的(de)高(gāo)精度智能力控機器人(rén),具備安全碰撞檢測、關節力矩控制、拖拽示教及圖形化(huà)編程等功能,可(kě)以實現快(kuài)速部署并輕松适應多(duō)種應用(yòng)場(chǎng)景。内置高(gāo)精度關節扭矩傳感器可(kě)實現高(gāo)精度力感知及力矩控制,能夠使得(de)機器人(rén)與周邊設備及環境進行實時(shí)、安全的(de)交互。
-
Thor 12高(gāo)精度智能機器人(rén)Thor12是思靈機器人(rén)自主研發的(de)高(gāo)精度智能機器人(rén),具備安全碰撞檢測和(hé)圖形化(huà)編程功能。負載12kg,工作半徑可(kě)達1300mm,具有快(kuài)速作業、易于操作及部署快(kuài)捷的(de)特點,适用(yòng)于裝配、上下(xià)料、搬運碼垛等場(chǎng)合,可(kě)滿足高(gāo)節拍(pāi)需求作業,且能夠與周邊設備和(hé)環境進行安全的(de)交互。
智能柔性機器人(rén)操作平台
FIP
柔性智能平台是由智能機器人(rén)操作平台、模塊化(huà)傳送帶和(hé)智能化(huà)供料系統組成,通(tōng)過可(kě)快(kuài)速更換的(de)模塊化(huà)末端工具和(hé)平台工裝,能夠快(kuài)速适應不同機型手機生産線的(de)機器人(rén)平台。
柔性智能平台搭配了(le)思靈機器人(rén)自主開發的(de) Agile Core操作系統,可(kě)實現新技能加載、任務編程、産線布局修改調整,乃至全智能化(huà)生産。
柔性智能平台可(kě)大(dà)大(dà)縮短用(yòng)戶生産線和(hé)機器人(rén)部署時(shí)間,爲用(yòng)戶降低集成難度和(hé)人(rén)力投入成本。
智能力控機器人(rén)
Diana 7
Diana 7 是思靈機器人(rén)自主研發的(de)高(gāo)精度智能力控機器人(rén),關節内置高(gāo)精度扭矩傳感器,具有高(gāo)靈敏的(de)力控制能力和(hé)碰撞檢測能力。采用(yòng)七自由度冗餘設計提高(gāo)了(le)機器人(rén)的(de)運動靈活度,零空間控制技術使得(de)機器人(rén)能夠在有限工作空間中靈活避障,因此可(kě)以輕松适應更複雜(zá)的(de)應用(yòng)場(chǎng)景。

通(tōng)用(yòng)智能力控醫療機器人(rén)
Diana 7 Med
Diana 7 Med 是思靈機器人(rén)自主研發的(de)通(tōng)用(yòng)醫療機器人(rén),關節内置高(gāo)精度扭矩傳感器,具有高(gāo)靈敏的(de)力感知能力和(hé)碰撞檢測能力。采用(yòng) 7 自由度設計,具有靈活的(de)工作空間和(hé)控制模式。主要應用(yòng)場(chǎng)景包括: 骨科、神經外科、牙科等硬組織的(de)機器人(rén)輔助手術,此外也(yě)可(kě)用(yòng)于超聲相關的(de)診療、康複理(lǐ)療等。
智能機器人(rén)
Thor 3
Thor3是思靈機器人(rén)自主研發的(de)高(gāo)精度智能機器人(rén),具備安全碰撞檢測及圖形化(huà)編程等功能。具有小巧輕便、敏捷到位、易于操作及安裝快(kuài)捷的(de)特點,适合應用(yòng)在輕型裝配和(hé)自動化(huà)作業台等場(chǎng)合,可(kě)以輕松實現作業場(chǎng)景的(de)快(kuài)速部署,并能夠與周邊設備和(hé)環境進行安全的(de)交互。

高(gāo)精度智能機器人(rén)
Thor 7
Thor7是思靈機器人(rén)自主研發的(de)高(gāo)精度智能機器人(rén),具備安全碰撞檢測和(hé)圖形化(huà)編程功能。負載7kg,工作半徑可(kě)達900mm,具有易于操作、敏捷到位、部署快(kuài)捷的(de)特點,适用(yòng)于自動化(huà)集成、裝配、上下(xià)料等場(chǎng)景,且能夠與周邊設備和(hé)環境進行安全的(de)交互。

高(gāo)精度智能力控機器人(rén)
Thor 7 Pro
Thor7 Pro是思靈機器人(rén)自主研發的(de)高(gāo)精度智能力控機器人(rén),具備安全碰撞檢測、關節力矩控制、拖拽示教及圖形化(huà)編程等功能,可(kě)以實現快(kuài)速部署并輕松适應多(duō)種應用(yòng)場(chǎng)景。内置高(gāo)精度關節扭矩傳感器可(kě)實現高(gāo)精度力感知及力矩控制,能夠使得(de)機器人(rén)與周邊設備及環境進行實時(shí)、安全的(de)交互。

高(gāo)精度智能機器人(rén)
Thor 12
Thor12是思靈機器人(rén)自主研發的(de)高(gāo)精度智能機器人(rén),具備安全碰撞檢測和(hé)圖形化(huà)編程功能。負載12kg,工作半徑可(kě)達1300mm,具有快(kuài)速作業、易于操作及部署快(kuài)捷的(de)特點,适用(yòng)于裝配、上下(xià)料、搬運碼垛等場(chǎng)合,可(kě)滿足高(gāo)節拍(pāi)需求作業,且能夠與周邊設備和(hé)環境進行安全的(de)交互。

-
世界領先的(de)力控&力感知技術通(tōng)過強大(dà)的(de)自研AI算(suàn)法以及自主研發的(de)高(gāo)分(fēn)辨扭矩傳感器,世界最靈敏的(de)碰撞檢測能力成爲了(le)現實。思靈機器人(rén)緻力于突破現有機器人(rén)技術的(de)極限,讓感知更加靈敏,在刀(dāo)尖碰到人(rén)體皮膚的(de)瞬間,憑借毫秒級的(de)反應時(shí)間及強大(dà)的(de)算(suàn)力保證人(rén)體的(de)絕對(duì)安全。
-
高(gāo)度智能化(huà)的(de)機器人(rén)操作系統思靈自研機器人(rén)大(dà)腦(nǎo)、機器人(rén)操作系統(Agile Core)處于世界領先水(shuǐ)平,通(tōng)過算(suàn)力、AI機器人(rén)大(dà)腦(nǎo)及操作系統可(kě)以不斷學習(xí)、叠代升級,形成軟硬件結合生态系統。 機器人(rén)大(dà)腦(nǎo)及操作系統重新定義自動化(huà)系統配置方式,集成了(le)力控制與視覺控制界面的(de)人(rén)性化(huà)配置界面,可(kě)以同時(shí)連接各類軟硬件設備,進行快(kuài)速智能化(huà)部署,在數小時(shí)内完成新任務的(de)配置工作,極大(dà)提高(gāo)設備稼動率,避免設備閑置和(hé)冗長(cháng)配置過程帶來(lái)的(de)浪費。
-
自主規劃&機器人(rén)智能思靈機器人(rén)通(tōng)過自主研發的(de)基于深度及強化(huà)學習(xí)的(de)AI智能算(suàn)法,實現毫秒級的(de)視覺辨識速度,并使機器人(rén)具備自動規劃路徑的(de)能力。機器人(rén)大(dà)腦(nǎo)可(kě)以迅速識别海量未知物(wù)體目标、自動辨識抓取部位,使人(rén)機協作更加便捷、高(gāo)效、安全。
-
世界級的(de)機器視覺算(suàn)法讓機器人(rén)“看見世界”,思靈機器人(rén)在視覺感知方面有著(zhe)深厚積累。自主研發關鍵技術,如高(gāo)精度傳感器标定、特征提取、匹配和(hé)跟蹤,基于深度學習(xí)的(de)目标檢測與實例分(fēn)割。部署簡單可(kě)靠,且支持并行加速,可(kě)實現精确,穩定,快(kuài)速的(de)物(wù)體定位,測量與空間位姿解算(suàn)。應用(yòng)于視覺引導的(de)機器人(rén)軌迹生成,軌迹修正,視覺伺服等場(chǎng)景,滿足未知與非結構化(huà)場(chǎng)景中機器人(rén)的(de)操作需求。思靈機器人(rén)的(de)視覺技術已在多(duō)個(gè)應用(yòng)場(chǎng)景中落地,包括但不限于3C消費電子行業、醫學領域、農牧業、輕工制造業。
两倍300.jpg)
两倍300 拷贝 .jpeg)
两倍300 .jpg)
思靈機器人(rén)(Agile Robots)戰略投資寶馬集團旗下(xià)子公司idealworks,成爲其控股股東
全球領先的(de)智能機器人(rén)獨角獸企業思靈機器人(rén)(Agile Robots)宣布戰略投資寶馬集團子公司idealworks,成爲其控股股東。
.jpg)
閱讀更多(duō)
11.05
-
思靈機器人(rén)完成對(duì)機器人(rén)公司Franka Emika的(de)收購(gòu)全球領先的(de)智能機器人(rén)獨角獸企業思靈機器人(rén)宣布完成對(duì)機器人(rén)公司Franka Emika收購(gòu)。11.03
-
Diana和(hé)Thor系列家族再添新員(yuán)!思靈重磅推出五款新品近日,思靈機器人(rén)(Agile Robots)進一步擴大(dà)Diana系列和(hé)Thor系列家族,推出五款智能機器人(rén),覆蓋更廣泛的(de)領域,爲客戶提供更多(duō)選擇和(hé)更高(gāo)性能。08.28
-
華東總部成立!思靈機器人(rén)(昆山)正式開業!2023年5月(yuè)27日,思靈機器人(rén)華東總部在昆山陸家華成智能機器人(rén)産業園正式揭幕,标志著(zhe)思靈機器人(rén)業務在華東地區(qū)的(de)布局完成了(le)戰略性的(de)一步。06.01
-
思靈機器人(rén)(Agile Robots)榮獲2023IF設計大(dà)獎近日,2023年德國iF設計獎名單正式揭曉,思靈智能力控機器人(rén)Diana 3和(hé)Automatica展台設計從56個(gè)國家和(hé)地區(qū)近11000件參賽作品中脫穎而出,成功斬獲2023年iF設計獎。05.18












